3 - Representaciones de grafos en C
Elegir cómo guardar un grafo en memoria cambia la complejidad de las operaciones. En C predominan dos estructuras: la matriz de adyacencia y la lista de adyacencia. Este tema compara ambas, sus costos y los escenarios donde conviene cada una.
3.1 Matriz de adyacencia
Se usa un arreglo bidimensional n x n donde n es la cantidad de vértices. Cada celda [u][v] indica si existe arista de u a v (o almacena el peso si el grafo es ponderado).
#include <stdio.h>
#define N 4
int main(void) {
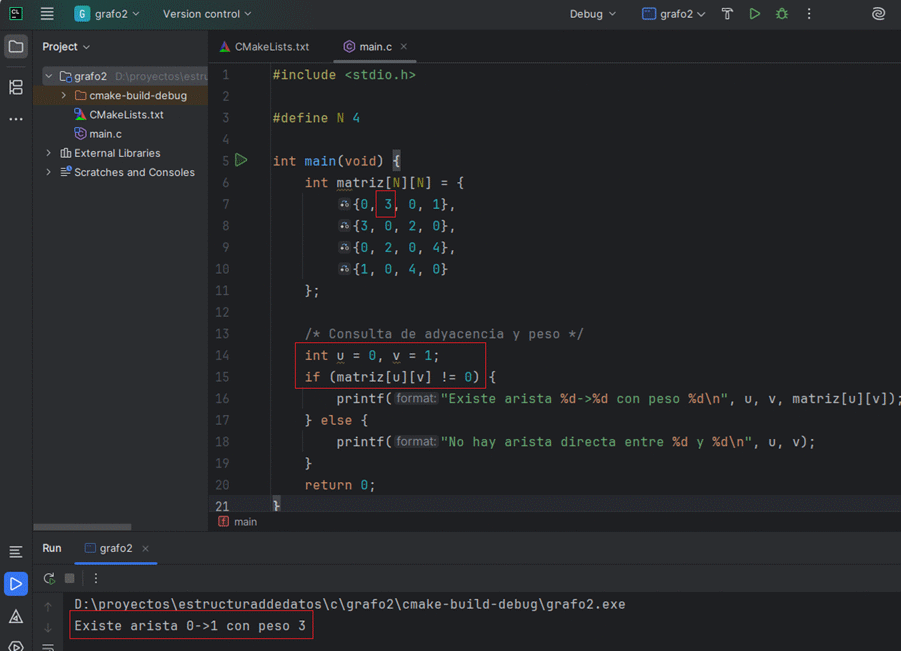
int matriz[N][N] = {
{0, 3, 0, 1},
{3, 0, 2, 0},
{0, 2, 0, 4},
{1, 0, 4, 0}
};
/* Consulta de adyacencia y peso */
int u = 0, v = 1;
if (matriz[u][v] != 0) {
printf("Existe arista %d->%d con peso %d\n", u, v, matriz[u][v]);
} else {
printf("No hay arista directa entre %d y %d\n", u, v);
}
return 0;
}La consulta de adyacencia es O(1) y el código queda compacto. El costo es el consumo de memoria O(n²), incluso si hay pocas aristas.
3.2 Lista de adyacencia
Cada vértice guarda una lista de sus vecinos. Se implementa con arreglos de listas enlazadas o con arreglos de vectores dinámicos.
#include <stdio.h>
#include <stdlib.h>
typedef struct Arista {
int destino;
int peso;
struct Arista *sig;
} Arista;
typedef struct Grafo {
int n;
Arista **listas; /* arreglo de punteros a listas */
} Grafo;
Grafo *crearGrafo(int n) {
Grafo *g = malloc(sizeof(Grafo));
if (!g) return NULL;
g->n = n;
g->listas = calloc(n, sizeof(Arista *));
return g;
}
void agregarArista(Grafo *g, int u, int v, int peso) {
Arista *nuevo = malloc(sizeof(Arista));
if (!nuevo) return;
nuevo->destino = v;
nuevo->peso = peso;
nuevo->sig = g->listas[u];
g->listas[u] = nuevo;
}
void imprimirVecinos(Grafo *g, int u) {
printf("Vecinos de %d:", u);
for (Arista *it = g->listas[u]; it; it = it->sig) {
printf(" %d(peso=%d)", it->destino, it->peso);
}
printf("\n");
}
int main(void) {
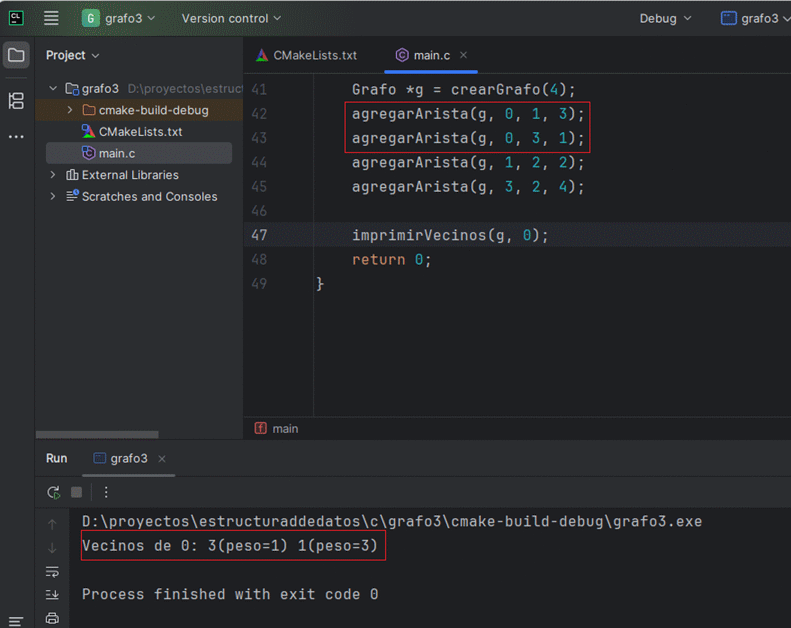
Grafo *g = crearGrafo(4);
agregarArista(g, 0, 1, 3);
agregarArista(g, 0, 3, 1);
agregarArista(g, 1, 2, 2);
agregarArista(g, 3, 2, 4);
imprimirVecinos(g, 0);
return 0;
}Con las inserciones anteriores, la lista de vecinos de 0 queda en el orden de inserción inverso (agregamos al frente), por lo que la salida esperada es: Vecinos de 0: 3(peso=1) 1(peso=3).
El uso de memoria es proporcional al número de aristas (O(n + m)). Consultar adyacencia directa requiere recorrer la lista de vecinos de u (O(grado(u))).
3.3 Comparación entre estructuras
- Adyacencia: matriz O(1); lista O(grado(u)).
- Memoria: matriz O(n²); lista O(n + m).
- Iterar vecinos: similar en ambas; la lista ahorra posiciones vacías.
- Mutabilidad: insertar/eliminar aristas es inmediato en lista; en matriz basta asignar pero se paga el costo fijo de n² celdas.
3.4 Costos de memoria en cada representación
En una matriz de enteros de 4 bytes, un grafo con 5.000 vértices ocupa alrededor de 95 MB aunque tenga pocas aristas. En una lista de adyacencia, el consumo crece con las aristas efectivas: cada nodo de lista suma el peso (4 bytes), el destino (4 bytes) y el puntero (8 bytes en arquitecturas de 64 bits), más la estructura base.
3.5 Cuándo conviene usar cada una
- Matriz: grafos densos, tamaño moderado y consultas frecuentes de adyacencia; útil para algoritmos basados en matrices (Floyd-Warshall).
- Lista: grafos dispersos o grandes, cuando se prioriza memoria o se recorre a menudo la vecindad; natural para Dijkstra con montículo y BFS/DFS.
- En proyectos mixtos se combina: matriz para precálculos rápidos y lista para recorridos eficientes.